![]()
VPipelineDemo application
An example of VPipeline C++ library usage
v1.2.0
Table of contents
- Overview
- Application versions
- Application files
- Build application
- Launch and user interface
- Control
- Prepare compiled library files
Overview
The VPipelineDemo is an example of VPipeline library usage. The application shows how to initialize and use VPipeline library. The application (repository) is CMake project and can be used as template for your project. It provides VPipeline initialization, basic user interface based on OpenCV and control of all video processing pipeline modules (filters, video tracker, detectors). The application doesn’t provide camera and lens control. After starting, the application initializes VPipeline with libraries: VSourceOpenCv (as video source module), ImageFlip (as first video filter), DigitalZoom (as second video filter), VideoStabiliserOpenCv (as video stabilization module), Dehazer (as fourth video filter), MotionMagnificator (as fifth video filter), CvTracker (as video tracker module), Gmd (motion detector library as first object detector), Ged (video changes detector library as second object detector) and DnnOpenCvDetector (neural network object detector library as third objects detector). The application doesn’t initialize lens and camera controllers (dummy video and lens controllers will be initialized). Also, the library doesn’t initialize the third video filter (a dummy video filter will be initialized) and the fourth object detector (a dummy object detector will be initialized). After initialization, the application runs the main loop. The application uses C++17 standard. The image below shows the processing pipeline structure:
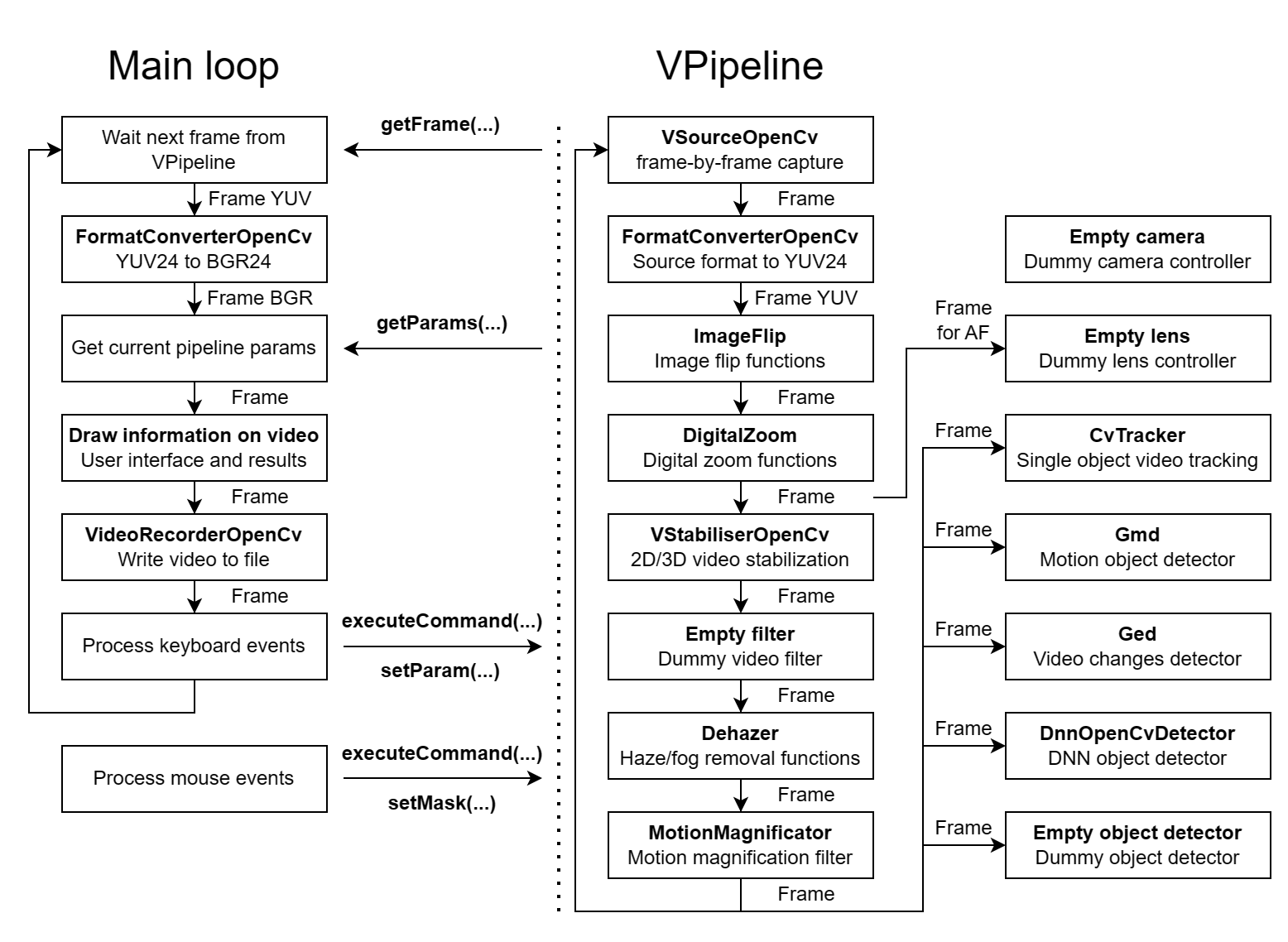
The application reads configuration params from VPipelineDemo.json file and initializes VPipeline. After initialization, VPipeline will run an internal processing loop which includes: video capture, image flip, digital zoom, video stabilization, defog / dehaze, motion magnification, video tracking (separate thread), motion detection (separate thread), video changes detection (separate thread) and DNN (neural network) detection (separate thread). The user can choose a file dialog to open video files using SimpleFileDialog library. The application main loop waits for a video frame from VPipeline library, converts YUV24 format (native format for video processing pipeline) to BGR24 (native format for OpenCV), obtains current params from VPipeline library (parameters of all modules and object detection results), draws information on video, records video (using VideoRecorderCv library), displays video with information to the user and processes keyboard events (button press events). The application shows how to control each module of VPipeline library.
Application versions
Table 1 - Application versions.
| Version | Release date | What’s new |
|---|---|---|
| 1.0.0 | 07.05.2024 | First version. |
| 1.0.1 | 22.05.2024 | - Submodules updated. - Documentation updated. |
| 1.0.2 | 02.08.2024 | - Submodules updated. |
| 1.0.3 | 18.09.2024 | - CvTracker submodule updated. |
| 1.0.4 | 05.10.2024 | - Update submodules. |
| 1.0.5 | 04.12.2024 | - Update submodules. |
| 1.0.6 | 15.12.2024 | - Update submodules. |
| 1.0.7 | 02.02.2025 | - Update submodules. |
| 1.0.8 | 24.02.2025 | - Update submodules. |
| 1.0.9 | 18.03.2025 | - Update CvTracker submodule. |
| 1.0.10 | 03.04.2025 | - Multiple submodules update. |
| 1.0.11 | 27.04.2025 | - Multiple submodules update. |
| 1.0.12 | 15.05.2025 | - CvTracker submodule update. |
| 1.0.13 | 19.07.2025 | - CvTracker submodule update. - Gmd submodule update. |
| 1.0.14 | 10.08.2025 | - CvTracker submodule update. - Gmd submodule update. |
| 1.1.0 | 16.08.2025 | - CMake structure changed. |
| 1.2.0 | 29.03.2026 | - Fixed compilation errors. - Fixed documentation. |
Application files
The VPipelineDemo is provided as source code. Users are given a set of files in the form of a CMake project (repository). The repository structure is outlined below:
CMakeLists.txt ----------- Main CMake file of the application.
src ---------------------- Folder with source code of the library.
CMakeLists.txt ------- CMake file of the application.
main.cpp ------------- Source code file of the application.
Build application
The VPipelineDemo is a complete repository in the form of a CMake project. The application and all included libraries depend only on OpenCV. Before compiling, you have to install the OpenCV library into your OS. Also, to compile the application, you have to install CMake. To install dependencies in Linux (Ubuntu), use the command:
sudo apt-get install cmake libopencv-dev
Typical commands to build VPipelineDemo application (Release mode):
cd VPipelineDemo
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=Release ..
make
Launch and user interface
After compiling, you will get VPipelineDemo.exe executable file on Windows or VPipelineDemo executable file on Linux. To run the application on Linux, run the command:
./VPipelineDemo
Note: On Windows, you may need to copy OpenCV dll files to the application’s executable file folder. After starting, the application will create a configuration file (if it doesn’t exist) VPipelineDemo.json with default VPipeline parameters. But it is recommended to copy configuration file (VPipelineDemo.json) and neural network file for DNN object detector (yolov7-tiny_640x640.onnx) from static folder of VPipelineDemo repository. Default contents of the configuration file:
{
"Params": {
"camera": {
"agcMode": 0,
"alcGate": 0,
"autoNucIntervalMsec": 0,
"blackAndWhiteFilterMode": 0,
"brightness": 0,
"brightnessMode": 0,
"changingLevel": 0.0,
"changingMode": 0,
"chromaLevel": 0,
"contrast": 0,
"custom1": 0.0,
"custom2": 0.0,
"custom3": 0.0,
"ddeLevel": 0.0,
"ddeMode": 0,
"defogMode": 0,
"dehazeMode": 0,
"detail": 0,
"digitalZoom": 0.0,
"digitalZoomMode": 0,
"displayMode": 0,
"exposureCompensationMode": 0,
"exposureCompensationPosition": 0,
"exposureMode": 0,
"exposureTime": 0,
"filterMode": 0,
"fps": 0.0,
"gain": 0,
"gainMode": 0,
"height": 0,
"imageFlip": 0,
"initString": "",
"isoSensitivity": 0,
"logMode": 0,
"noiseReductionMode": 0,
"nucMode": 0,
"palette": 0,
"profile": 0,
"roiX0": 0,
"roiX1": 0,
"roiY0": 0,
"roiY1": 0,
"sceneMode": 0,
"sensitivity": 0.0,
"sharpening": 0,
"sharpeningMode": 0,
"shutterMode": 0,
"shutterPos": 0,
"shutterSpeed": 0,
"stabilizationMode": 0,
"type": 0,
"videoOutput": 0,
"whiteBalanceArea": 0,
"whiteBalanceMode": 0,
"wideDynamicRangeMode": 0,
"width": 0
},
"general": {
"enable": true,
"logMode": 2
},
"lens": {
"afHwSpeed": 0,
"afRange": 0,
"afRoiMode": 0,
"afRoiX0": 0,
"afRoiX1": 0,
"afRoiY0": 0,
"afRoiY1": 0,
"autoAfRoiBorder": 0,
"autoAfRoiHeight": 0,
"autoAfRoiWidth": 0,
"custom1": 0.0,
"custom2": 0.0,
"custom3": 0.0,
"extenderMode": 0,
"filterMode": 0,
"focusFactorThreshold": 0.0,
"focusHwFarLimit": 0,
"focusHwMaxSpeed": 0,
"focusHwNearLimit": 0,
"focusMode": 0,
"fovPoints": [],
"initString": "",
"irisHwCloseLimit": 0,
"irisHwMaxSpeed": 0,
"irisHwOpenLimit": 0,
"irisMode": 0,
"logMode": 0,
"refocusTimeoutSec": 0,
"stabiliserMode": 0,
"type": 0,
"zoomHwMaxSpeed": 0,
"zoomHwTeleLimit": 0,
"zoomHwWideLimit": 0
},
"objectDetector1": {
"classNames": [
""
],
"custom1": 0.0,
"custom2": 0.0,
"custom3": 0.0,
"enable": true,
"frameBufferSize": 5,
"initString": "",
"logMode": 2,
"maxObjectHeight": 128,
"maxObjectWidth": 128,
"maxXSpeed": 30.0,
"maxYSpeed": 30.0,
"minDetectionProbability": 0.5,
"minObjectHeight": 4,
"minObjectWidth": 4,
"minXSpeed": 0.009999999776482582,
"minYSpeed": 0.009999999776482582,
"numThreads": 1,
"resetCriteria": 5,
"scaleFactor": 1,
"sensitivity": 10.0,
"type": 0,
"xDetectionCriteria": 10,
"yDetectionCriteria": 10
},
"objectDetector2": {
"classNames": [],
"custom1": 0.0,
"custom2": 0.0,
"custom3": 0.0,
"enable": false,
"frameBufferSize": 30,
"initString": "",
"logMode": 2,
"maxObjectHeight": 128,
"maxObjectWidth": 128,
"maxXSpeed": 30.0,
"maxYSpeed": 30.0,
"minDetectionProbability": 0.5,
"minObjectHeight": 4,
"minObjectWidth": 4,
"minXSpeed": 0.009999999776482582,
"minYSpeed": 0.009999999776482582,
"numThreads": 1,
"resetCriteria": 1,
"scaleFactor": 1,
"sensitivity": 10.0,
"type": 0,
"xDetectionCriteria": 2,
"yDetectionCriteria": 2
},
"objectDetector3": {
"classNames": [],
"custom1": 0.0,
"custom2": 0.0,
"custom3": 0.0,
"enable": true,
"frameBufferSize": 0,
"initString": "yolov7-tiny_640x640.onnx;640;640",
"logMode": 2,
"maxObjectHeight": 256,
"maxObjectWidth": 256,
"maxXSpeed": 0.0,
"maxYSpeed": 0.0,
"minDetectionProbability": 0.5,
"minObjectHeight": 4,
"minObjectWidth": 4,
"minXSpeed": 0.0,
"minYSpeed": 0.0,
"numThreads": 0,
"resetCriteria": 0,
"scaleFactor": 0,
"sensitivity": 0.0,
"type": 0,
"xDetectionCriteria": 0,
"yDetectionCriteria": 0
},
"objectDetector4": {
"classNames": [],
"custom1": 0.0,
"custom2": 0.0,
"custom3": 0.0,
"enable": false,
"frameBufferSize": 0,
"initString": "",
"logMode": 0,
"maxObjectHeight": 0,
"maxObjectWidth": 0,
"maxXSpeed": 0.0,
"maxYSpeed": 0.0,
"minDetectionProbability": 0.0,
"minObjectHeight": 0,
"minObjectWidth": 0,
"minXSpeed": 0.0,
"minYSpeed": 0.0,
"numThreads": 0,
"resetCriteria": 0,
"scaleFactor": 0,
"sensitivity": 0.0,
"type": 0,
"xDetectionCriteria": 0,
"yDetectionCriteria": 0
},
"videoFilter1": {
"custom1": -1.0,
"custom2": -1.0,
"custom3": -1.0,
"level": -1.0,
"mode": 0,
"type": -1
},
"videoFilter2": {
"custom1": -1.0,
"custom2": -1.0,
"custom3": -1.0,
"level": 1.0,
"mode": 0,
"type": 0
},
"videoFilter3": {
"custom1": 0.0,
"custom2": 0.0,
"custom3": 0.0,
"level": 0.0,
"mode": 0,
"type": 0
},
"videoFilter4": {
"custom1": -1.0,
"custom2": -1.0,
"custom3": -1.0,
"level": 0.0,
"mode": 0,
"type": 0
},
"videoFilter5": {
"custom1": -1.0,
"custom2": -1.0,
"custom3": -1.0,
"level": 62.5,
"mode": 0,
"type": -1
},
"videoSource": {
"custom1": -1.0,
"custom2": -1.0,
"custom3": -1.0,
"exposureMode": 0,
"focusMode": 0,
"fourcc": "BGR24",
"fps": 30.0,
"gainMode": -1,
"height": 720,
"logLevel": 0,
"roiHeight": 0,
"roiWidth": 0,
"roiX": 0,
"roiY": 0,
"source": "test.mp4",
"width": 1280
},
"videoStabiliser": {
"aFilterCoeff": 0.8999999761581421,
"aOffsetLimit": 10.0,
"constAOffset": 0.0,
"constXOffset": 0,
"constYOffset": 0,
"cutFrequencyHz": 0.0,
"enable": false,
"fps": 30.0,
"logMod": 0,
"scaleFactor": 1,
"transparentBorder": true,
"type": 2,
"xFilterCoeff": 0.8999999761581421,
"xOffsetLimit": 150,
"yFilterCoeff": 0.8999999761581421,
"yOffsetLimit": 150
},
"videoTracker": {
"custom1": -1.0,
"custom2": -1.0,
"custom3": -1.0,
"frameBufferSize": 256,
"lostModeOption": 0,
"maxFramesInLostMode": 128,
"multipleThreads": false,
"numChannels": 3,
"rectAutoPosition": false,
"rectAutoSize": false,
"rectHeight": 72,
"rectWidth": 72,
"searchWindowHeight": 256,
"searchWindowWidth": 256,
"type": -1
}
}
}
The application parameters consist of only VPipeline parameters. Table 2 shows short description of parameters.
Table 2 - Application parameters.
| Parameter | Description |
|---|---|
| camera | Camera controller parameters. Not used in the application. A dummy camera controller will be initialized. |
| lens | Lens controller parameters. Not used in the application. A dummy lens controller will be initialized. |
| general | General video processing pipeline parameters. |
| objectDetector1 | First object detector parameters. Motion detector parameters. Gmd object will be initialized. |
| objectDetector2 | Second object detector parameters. Video changes detector parameters. Ged object will be initialized. |
| objectDetector3 | Third object detector parameters. DNN object detector parameters. DnnOpenCvDetector object will be initialized. |
| objectDetector4 | Fourth object detector parameters. Not used in the application. A dummy object detector will be initialized. |
| videoFilter1 | First video filter parameters. Image flip module. ImageFlip object will be initialized. |
| videoFilter2 | Second video filter parameters. Digital zoom module. DigitalZoom object will be initialized. |
| videoFilter3 | Third video filter parameters. Not used in the application. A dummy video filter will be initialized. |
| videoFilter4 | Fourth video filter parameters. Defog / dehaze module. Dehazer object will be initialized. |
| videoFilter5 | Fifth video filter parameters. Motion magnification module. MotionMagnificator object will be initialized. |
| videoSource | Video source parameters. Video capture module. VSourceOpenCv object will be initialized. Note: by default the “source” field has the value “test.mp4” which means to open a video file (test file located in static folder). If you change the value to “file dialog”, the application will open a file dialog to choose a video. Also, you can open a camera by its number (“0”, “1” etc.) or you can open an RTSP stream (“rtsp://192.168.1.100:7000/live”) (Note: in the case of an RTSP stream, video capture latency can be high). |
| videoStabiliser | Video stabilizer parameters. VStabiliserOpenCv object will be initialized. |
| videoTracker | Video tracker parameters. CvTracker object will be initialized. |
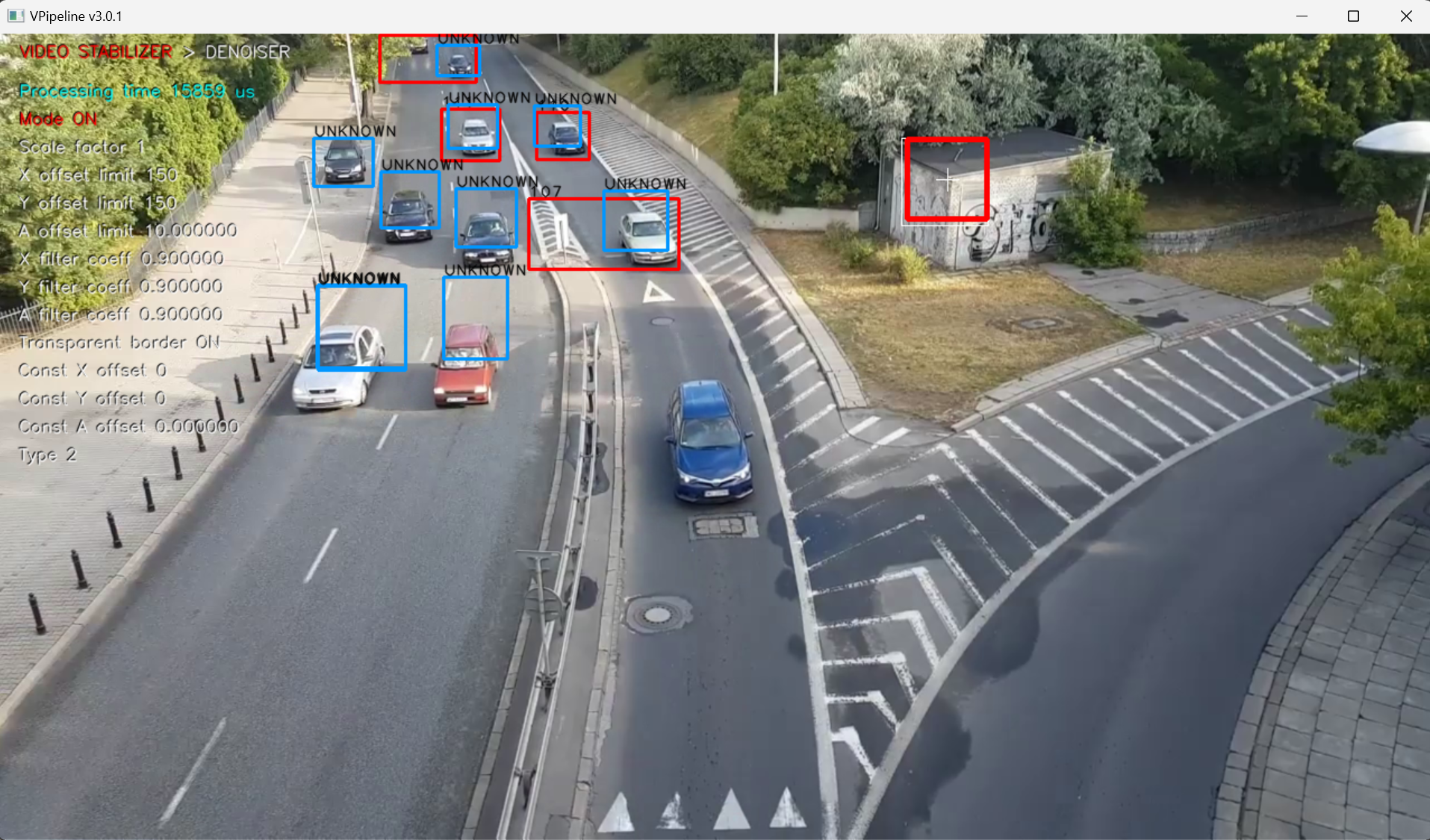
After starting the application (running the executable file), the user should select the video file in the dialog box (if the parameter “source” in the config file is set to “file dialog”). After that, the user will see the user interface as shown below. The window shows the original video with detection results and video tracker rectangle.
Control
To control the application, it is necessary that the main video display window is active (in focus), and also it is necessary that the English keyboard layout is activated without CapsLock mode. The program is controlled by the keyboard and mouse.
Table 3 - Control buttons.
| Button | Description |
|---|---|
| ESC | Exit the application. If video recording is active, it will be stopped. |
| ENTER | Start/stop playback mode. |
| R | Start/stop video recording. When video recording is enabled, a file dst_[date and time].avi (result video) is created in the directory with the application executable file. Recording is performed of what is displayed to the user. To stop the recording, press the R key again. During video recording, the application shows a warning message. |
| ↑ | Arrow up. Navigate through parameters for a particular module. Active parameters will be highlighted in red. |
| ↓ | Arrow down. Navigate through parameters for a particular module. Active parameters will be highlighted in red. |
| → | Arrow right. Navigate through video processing pipeline modules. |
| ← | Arrow left. Navigate through video processing pipeline modules. |
| + | Increase value of chosen parameter of particular module. |
| - | Decrease value of chosen parameter of particular module. |
| W | Increase tracking rectangle height by 8 pixels. Can be changed in tracking mode. |
| S | Decrease tracking rectangle height by 8 pixels. Can be changed in tracking mode. |
| D | Increase tracking rectangle width by 8 pixels. Can be changed in tracking mode. |
| A | Decrease tracking rectangle width by 8 pixels. Can be changed in tracking mode. |
| T | Move the tracking rectangle UP by 4 pixels. |
| G | Move the tracking rectangle DOWN by 4 pixels. |
| F | Move the tracking rectangle LEFT by 4 pixels. |
| H | Move the tracking rectangle RIGHT by 4 pixels. |
| Q | Enable/disable tracking rectangle auto size. |
| E | Enable/disable tracking rectangle auto position. |
| Z | Adjust tracking rectangle size and position once. |
| X | Move tracking rectangle to the center. |
| 1 | Save current application params to file. They will be loaded on the next application launch. |
| Mouse left button | Capture object for tracking. |
| Mouse right button | Reset object tracking. |
Prepare compiled library files
If you want to compile and collect all libraries from the VPipelineDemo repository with their header files on Linux, you can create a bash script in the repository root folder which will collect all necessary files in one place. To do this, compile VPipelineDemo and then follow these steps:
- Create a bash script (you have to have the nano editor installed):
cd VPipelineDemo
nano prepareCompiled
- Copy next text there:
#!/bin/bash
# Define the directory where you want to copy all .h files.
# Make sure to replace /path/to/destination with your actual destination directory path.
HEADERS_DESTINATION_DIR="./include"
LIB_DESTINATION_DIR="./lib"
# Check if the destination directory exists. If not, create it.
if [ ! -d "$HEADERS_DESTINATION_DIR" ]; then
mkdir -p "$HEADERS_DESTINATION_DIR"
fi
# Find and copy all .h files from the current directory to the destination directory.
# The "." specifies the current directory. Adjust it if you want to run the script from a different location.
find . -type f -name '*.h' -exec cp {} "$HEADERS_DESTINATION_DIR" \;
found_dir=$(find . -type d -name "nlohmann" -print -quit)
if [ -n "$found_dir" ]; then
cp -r "$found_dir" "$HEADERS_DESTINATION_DIR"
echo "Directory nlohmann has been copied to $HEADERS_DESTINATION_DIR."
fi
# Check if the destination directory exists. If not, create it.
if [ ! -d "$LIB_DESTINATION_DIR" ]; then
mkdir -p "$LIB_DESTINATION_DIR"
fi
# Find and copy all .a files from the current directory to the destination directory.
# The "." specifies the current directory. Adjust it if you want to run the script from a different location.
find . -type f -name '*.a' -exec cp {} "$LIB_DESTINATION_DIR" \;
- Save “Ctrl + S” and close “Ctrl + X”.
- Make the file executable and run:
sudo chmod +x prepareCompiled
./prepareCompiled